Problem Description
Cyber-physical systems (CPS) are enabling ground-breaking developments today, from autonomous cars and collaborative robots to smart factories. Their key feature is a real-time feedback loop in which processors take in a flood of sensor data, draw conclusions and instantly act on the physical world to pursue a common goal. Sensors are therefore essential - they translate the complex, fast-moving reality into the digital signals on which the algorithms are based. Virtual sensor technology based on machine learning has become a turning point in this context. Instead of installing a separate sensor for each variable, a learnt model derives variables that are difficult to measure from other, cheaper or more robust signals. The benefits are compelling: lower BOM costs, greater design flexibility and the ability to capture the invisible.
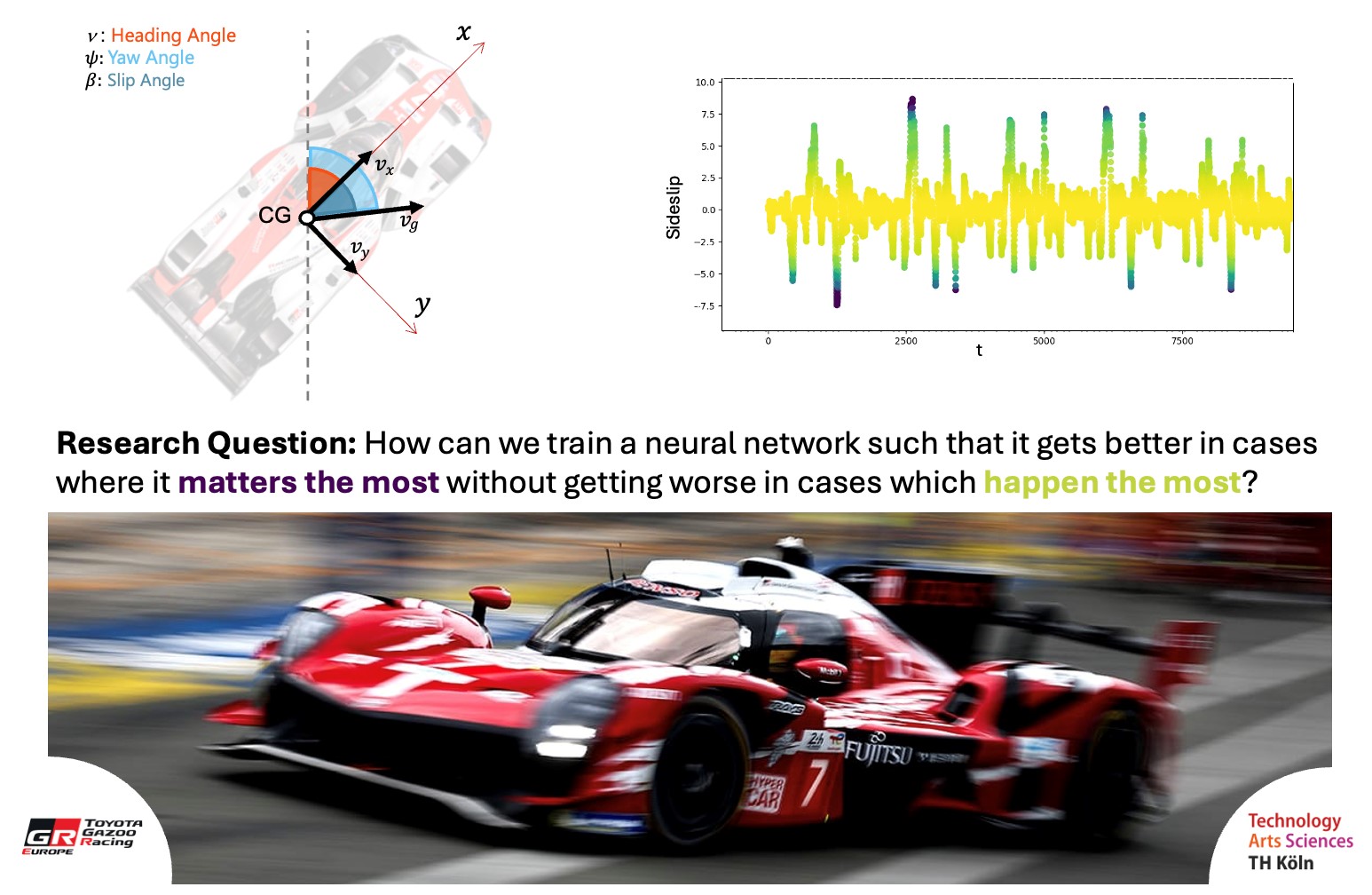
This case study focuses on vehicle sideslip angle (VSA)a measure of how much a car is drifting relative to its path. Advanced driver-assistance systems (ADAS) such as Electronic Stability Control use VSA to determine whenand on which wheelto apply braking force, keeping over-steer and under-steer in check. Accurate VSA estimates are therefore mission-critical for road safety. Unfortunately, optical or inertial sensors that measure VSA directly can cost orders of magnitude more than the standard ADAS sensor suite, pricing them out of most consumer vehicles. Virtual sensing offers an attractive workaround, but it brings a hidden risk: data imbalance. Real-world driving datasets are dominated by everyday, low-slip scenarios, while the rare, safety-critical drifts that matter most appear only sparsely. Left unaddressed, this skew biases the model, causing it to be inaccurate precisely when the vehicle most needs help. Because such imbalance is the norm rather than the exception in real-life deployment, rectifying it is not optionalit is a requirement for trusted AI in any cyber-physical application, and especially for virtual VSA estimation in everyday cars.
Project Definition
You will work in pairs or trios on a cleaned publicly available dataset, designing virtual-sensor models that predict vehicle sideslip angle while coping with its heavy data imbalance. Each team is free to combine techniquescost-sensitive losses, resampling, synthetic data, drift-focused augmentation, etc.to push accuracy where it matters most.
Performance is tracked on an in-house Kaggle-style leaderboard: every week you upload predictions for a hidden test split and instantly see how you rank against other groups. Weekly meetings provide short technical mini-lectures plus progress updates from each team, so everyone benefits from shared insights and healthy competition.
Deliverables:
- Well-documented code in a shared repository
- Leaderboard submissions throughout the term
- A demo of your real-time sideslip estimator (TorchScript or equivalent)
- A concise final report (~4 pages) summarizing methods, experiments, and lessons learned
Learning Outcome
- Tackle a cutting-edge research problem from the automotive domain
- Program in a modern scientific-computing language
- Integrate deep-learning and AI methods in a real-world like settings
- Gain hands-on insight into AI, deep learning, and optimization techniques
- Develop teamwork skills by collaborating in small groups
Participation Requirements
- Solid experience with Python and PyTorch
- Ability to work and write in a scientific manner
- Interest in applying AI research to real problems
- Knowledge introduced in ML/AI lectures
External Partner
The project is supported by Toyota Gazoo Racing Europe (TGR-E), the motorsport and advanced-engineering arm of Toyota based in Cologne. TGR-E brings world-class expertise in vehicle dynamics, data analytics, and real-time controlknowledge honed in top-tier series such as the FIA World Endurance Championship and World Rally Championship. This collaboration enables that your solutions are benchmarked against cutting-edge industry practice while giving you direct insight into how AI research transitions into race-proven, road-relevant technology.